@RIOTU_LAB


About iHunter Project
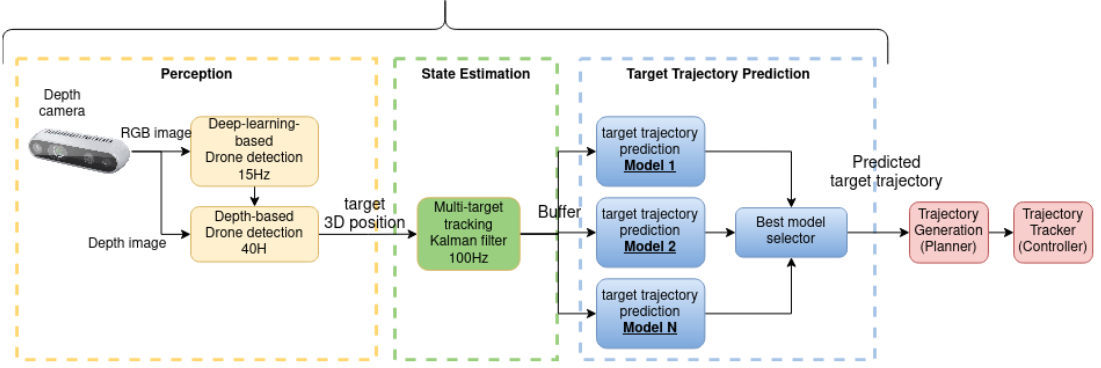
The project aims to develop an autonomous drone system with onboard intelligence for tracking other drones or targets for surveillance and/or reconnaissance missions using advanced technology such as computer vision, machine learning, and robotics. The hunting drone would be equipped with sensors and cameras to detect and track targets, decision-making algorithms to determine the best approach to track, follow, for further interception action. The system would also include navigation and communication capabilities for remote monitoring and high-level supervision by an operator. The development of interception methodologies is beyond the scope of this project. The ultimate goal of the project is to provide a solution for defending against unauthorized or malicious drone activity in sensitive areas such as airports, prisons, and critical infrastructure, as well as for surveillance and tracking applications in various fields such as, search and rescue, and security.
Meet the dedicated professionals behind our groundbreaking work in autonomous drone system at the RIOTU Lab, Prince Sultan University.

Research Center Director
Prof. Anis Koubaa

Robotics Team Lead
Dr. Mohamed Abdelkader

Postdoc
Dr. Imen Jarray

Research Engineer
Eng. Khaled Gabr

Research Engineer
Eng. Abdullah AlMusalami

Research Engineer
Eng. Omar Najar

Research Engineer
Eng. Abdulrahman AlBatati
© Robotics and Internet-of-Things Lab.